|
Fahrwerk, Neigetechnik und Antrieb |
|||
| Navigation durch das Thema | |||
|
Wenn
wir uns nun dem
Fahrwerk des
Neigezuges zuwenden, kommen wir auch zu dem
Punkt, der dem
Triebzug seine Bezeichnung gab. Dabei gab es bei einem
Neigezug zwei Probleme, die gelöst werden mussten. Das war die
Neigetechnik, die zusätzlichen Platz benötigte und die geringen bei diesen
Fahrzeugen zugelassenen
Achslasten. Letztere lagen bei maximal 15 Tonnen.
Wie
man das Problem mit den
Achslasten löste, erkennen wir, wenn wir einen
Blick auf die
Achsfolge
werfen. Diese wurde hier mit (1A) (A1) + (1A) (A1)
+ 2‘ 2‘ + 2‘ 2‘ + 2‘ 2‘ + (1A) (A1) + (1A) (A1) angegeben. Es fällt auf,
dass die benötigten acht
Antriebe auf vier Fahrzeuge verteilt werden
mussten. Zudem gab es in diesem Zug keine ausschliesslich angetriebenen
Drehgestelle.
Der Vorteil dieser Lösung war, dass bereits ander-weitig
verwendete Komponenten ohne grosse Pro-bleme eingebaut werden konnten. Es
war damit auch möglich, die Kosten pro
Drehgestell zu sen-ken.
Zu
den neuen Komponenten gehörte zum Beispiel die
Neigetechnik, welche wir
später genauer an-sehen werden. Wichtig zum jetzigen Zeitpunkt ist, dass
diese im
Drehgestelle untergebracht werden musste. Die
Bauart der
Drehgestelle erlaubte diesen Einbau. Dies führte dazu, dass viele
Komponenten bei den im Zug verbauten Drehgestellen, gleich gebaut werden
konnten.
Grundsätzlich wurden im ganzen Zug identische
Drehgestelle eingebaut.
Diese besassen einen Rahmen aus Stahl, der aus den Einzelteilen elektrisch
verschweisst wurde. Es entstand so ein H, das jedoch über gekröpfte
Schenkel verfügte und so einen tiefen Angriffspunkt für die Kräfte bei den
angetriebenen Ausführungen ermöglichte. Lediglich die beiden
Enddrehgestelle erhielten einen Stirnträger.
Dieser Stirnträger wurde benötigt, weil hier die Bauteile der
Zugsicherung
montiert werden mussten. Das waren der Sender und Empfänger für
Integra-Signum und die Koppelspule für
ZUB 121. Nicht vorhanden waren
jedoch die benötigten Bauteile für eine
Führerstandssignalisation, denn
diese waren zum Zeitpunkt der Bestellung noch nicht vorhanden.
In
jedem
Drehgestell wurden zwei
Achsen eingebaut, die sich jedoch nur bei
den ange-triebenen Modellen unterschieden. Diese geschmiedeten und
hochfesten Stahlwellen wur-den an den Enden mit den für die beiden
Räder
und die
Lager benötigten Aufnahmen und Anschlägen versehen. Unterschiede
zu anderen damals verwendeten Achsen gab es bisher jedoch nicht, so dass
mit Ausnahme der Räder ein üblicher
Radsatz entstand.
Die
einzelnen
Räder waren als
Monoblocräder
ausgeführt worden und sie wurden
auf der
Achse aufgeschrumpft. Eine gängige Methode, die sich bisher
bewährt hatte und die keine Probleme erwarten liess. Auch bei den
angetriebenen Achsen verzichtete man auf eine
Bandage. Der Grund mag
überraschen, aber diese Lösung hätte mehr Gewicht bedeutet und hier musste
jedes Gramm eingespart werden.
Wegen
der benötigten
Neigetechnik
musste jedoch der Durchmesser der
Räder
deutlich reduziert werden. So hatten diese
Monoblocräder neu lediglich
einen Durchmesser von 820 mm erhalten. Im Vergleich dazu, wurden bei den
neuen
Reisezugwagen der damaligen Zeit Räder mit einem Durchmesser von 940
mm verwendet. Jedoch waren die üblichen
Triebachsen
deutlich über diesem
Wert.
Ein
ungewohnter Anblick für den Betrachter, für die
Achse war jedoch die
höhere Drehzahl dieser
Radsätze ein Problem, das berücksichtigt werden
musste. Diese Räder führten daher dazu, dass die Lager stärker belastet wurden, denn deren Drehzahl wur-de gegenüber anderen Ausführungen deutlich ge-steigert.
Sie müssen bedenken, dass deren Drehzahl bei 200 km/h in etwa gleich gross
war, wie wenn der
TGV mit 300 km/h über die Strecke fuhr. Ein Punkt, der
daher nicht vernachlässigt werden durfte. Die Achsen lagerten daher in aussenliegenden dop-pelreihigen Rollenlagern, die mit einer dauerhaften Schmierung mit Fett versehen wurden.
Durch die
geschlossene Ausführung waren diese
Lager wartungsarm. Dabei verwendete
man jedoch Modelle, die auch bei Zügen für sehr hohe Ge-schwindigkeiten
verwendet wurden. Dadurch konnten diese auch die höheren Drehzahlen der
kleineren
Räder aufnehmen.
Jede
Achse wurde beidseitig gegenüber dem
Drehgestellrahmen mit einer
Luftfeder
abgefedert. Diese Lösung erlaubte eine optimale Abfederung der
ungefederten Masse, die hier sehr geringgehalten werden konnte. Ein
Vorteil der gerade hier bei hohen Geschwindigkeiten in engeren
Kurven
ausgesprochen wichtig war und dem Zug zu einer sehr guten Laufruhe
verhalf.
Die
Vorteile der Laufruhe waren jedoch nicht so wichtig, wie die Möglichkeit
diese
Federung so einzustellen, dass das Fahrzeug optimal abgestützt wurde.
Gerade bei schnellen Fahrten durch enge
Kurven, drückt der Schwerpunkt auf
die äussere
Feder. Mit einem Ausgleichbehälter wurde diesem Umstand
Rechnung getragen, so dass der Druck in der Feder erhöht wurde.
Nominell wurde im
Drehgestell ein Achsstand von 2 700 mm angegeben. Dieser
war für das befahren von engen Bögen ideal und passte so zum
Neigezug,
jedoch neigten solche Drehgestelle bei hohen Geschwindigkeiten dazu, dass
das Drehgestell ins Schlingern geraten konnte. Aus diesem Grund musste der
Triebzug mit speziellen Führungen bei den
Achslagern versehen werden.
Die
Führung der
Achse im
Drehgestell war, wie das bei
Neigezügen nötig ist,
nicht starr ausgeführt worden. Das hätte jedoch bei höheren
Geschwindigkeiten zu grösseren Problemen mit dem Laufverhalten des Zuges
geführt. Neigezüge galten daher nicht als besonders gut geeignete Züge für
Hochgeschwindigkeitsstrecken. Beim
ICN musste man daher eine spezielle
Lösung für das Problem suchen.
Die
Achsen wurden mit einer vom Kasten gesteuerten radialen Einstellung
versehen und waren daher sehr flexibel eingebaut worden. Diese radiale
Einstellung wurde bei den
Einheitswagen IV mit dem Programm «Navigator»
ausführlich getestet und galt daher als erprobt. Daher kam diese Lösung,
welche auch bei der
Lokomotive
Re 460 verwendet wurde, auch hier zum
Einbau. Jetzt wurde sie einfach benötigt.
Es waren daher untypisch für Neigezüge keine flexibel gefederten Achsen vorhan-den. Vielmehr waren diese aktiv gesteuert und passten sich daher jederzeit dem Geleise an.
Der
Triebzug sollte daher sehr gute
Laufeigenschaften erhalten. Aus diesem Grund war die
Zulassung zur neuen
Zugreihe N dank dieser Steuerung kein grosses Problem für den
Neigezug.
Die
Abstützung der einzelnen Wagen auf den beiden
Drehgestellen konnte nicht
so einfach ausgeführt werden, wie das bei herkömmlichen Zügen der Fall
war. In diesem Bereich setzen die Mechanismen der
Neigetechnik
ein und
bedingten daher, dass sich der Kasten nicht direkt auf dem Drehgestell
abstützen konnte. Daher müs-sen wir uns zuerst die Neigetechnik genauer
ansehen.
Als
grösster Unterschied zu den bisher eingebauten
Neigetechniken verwendete
man hier keine Lösung mit
Öl. Wegen dem geringen verfügbaren Platz musste
eine andere Lösung für das Problem gefunden werden. Man entschied sich für
eine mechanische Lösung sowohl für das
Drehgestell, als auch für den
Stromabnehmer, der die Neigung ausgleichen musste. So benötigte man keine
Portale.
Diese Stabilisatoren waren so ausgelegt worden, dass sie die
Federung nicht behinderten, jedoch keine Kippbewegungen des Kastens
gegenüber der Wiege zuliessen. Damit hatten wir eine Abstützung, die bisher jener von normalen Wagen entsprach und die mit der zentralen Federung einfach etwas ungewöhnlich abgefedert wurde.
Jedoch war die Rollenwiege nicht mit dem
Drehgestell direkt
verbunden, denn diese wurde für die
Neigetechnik des Zuges benötigt. Damit
kommen wir nun zu dem speziellen Bereich. Zwischen der Rollenwiege, welche auf Rollen seitlich beweglich war, und dem Drehgestellrahmen wurde der Stellantrieb einge-baut.
Der
Antrieb
hatte dabei zwei Aufgaben, denn er musste den Ka-sten stabilisieren und
gleichzeitig die Neigung desselben ein-stellen. Die maximal erlaubte
Neigung zur Innenseite der
Kurve betrug für den Kasten bis zu acht Grad.
Wir
haben daher eine aktive Kastenneigung erhalten, die bei
Neigezügen wichtig
war. Dank dem mechanisch ausgeführten
Stellantrieb, der aus der
Rüstungsindustrie stammte, reduzierte sich der Platzbedarf für die
Neigeantriebe auf den Bereich zwischen dem Kasten und dem
Drehgestell.
Diese war dank den kleinen
Rädern und dem gekröpften Rahmen vorhanden.
Durch die veränderte Länge der Stange wurde der Kasten zur Seite
gedrückt. Dank der vom Panzer Leopard stammenden Lös-ung, war diese
Veränderung in sehr kurzer Zeit möglich, was bei Einfahrten in
Kurven
wichtig war. Der Querträger wurde dabei mit einem Führungszapfen in der Rollenwiege gehalten und so in der Position fixiert. Ein Dreh-zapfen im herkömmlichen Sinn gab es nicht mehr, so dass die Drehgestelle sich um einen virtuellen Punkt drehten.
Dabei war jedoch gesichert, dass diese Bewegungen des
Drehgestells gegen die eingebaute Hemmung frei erfolgen konn-te. Bei Ausfall der Steuerelektronik, oder der Neigeantriebe, fiel jedoch die Kraft der Stellmotoren aus und der Stellantrieb war ohne Funktion. Er konnte so den Kasten nicht mehr bewegen. Nun bewirkte die Rollenwiege, dass sich der Kasten alleine durch seine Schwerkraft und die Massenträgheit automatisch aufstellte und in der Mittellage fixiert wurde.
Wir
haben nun die Kasten auf den
Drehgestellen abgestellt und können die Höhe
des Zuges bestimmen. Diese Höhe lag beim RABDe 500 bei 3 950 mm. Im
Vergleich zu anderen
Triebwagen (RBDe 4/4) der damaligen Zeit, war der Zug
nur unwesentlich höher, aber immer noch tiefer als ältere Modelle (RBe
4/4). So passte er ideal in das
Lichtraumprofil der Schweizerischen
Bundesbahnen SBB. Wobei seitlich der Kasten leicht eingezogen werden
musste.
Uns
fehlt damit eigentlich nur noch der
Antrieb. Dieser stellte das grösste
Problem bei der Einhaltung der erlaubten
Achslasten dar. Zudem musste
dieser so ausgeführt werden, dass die ungefederte Masse deutlich reduziert
werden konnte. Aus diesem Grund war es nicht möglich beide
Achsen eines
Drehgestells anzutreiben und die angetriebenen Achsen wurde im Zug
verteilt.
Die
einfachste Lösung für dieses Problem war einfach, die
Fahrmotoren durften
nicht im
Drehgestell montiert werden. Das führte dazu, dass der Motor am
Boden des Kastens montiert wurde. Um seine Schwingungen zu dämpfen wurden
dabei
Silentblöcke verwendet. Zudem war nur gegen die Innenseite jedes
Wagens für den Fahrmotor genug Platz vorhanden.
Das
führte dazu, dass die
Antriebe auf den Zug verteilt werden mussten. Daher
wurde in den Wagen eins, zwei, sechs und sieben, also in den Wagen der
zweiten
Wagenklasse, in jedem
Drehgestell immer nur die innere
Achse
angetrieben. Das ergab für den ganzen Zug acht
Triebachsen, die
immer nur zu zweit unter einem Wagen vorhanden waren.
Dank dieser
Gelenkwelle konnten durch deren Veränderung
der Länge die Bewegungen des
Triebdrehgestells und des
Neigeantriebs
ausgeglichen wer-den. Zudem erhöhte es die ungefederte Massen nicht so
stark. An der Triebachse selber wurde ein Achsgetriebe montiert. Dieses Achsge-triebe sorgte einerseits für die Lagerung der Gelenkwelle, drehte die Richtung des Drehmoments und übersetzte die Drehzahl des Fahrmotors auf jene der Triebachse.
Somit war auch gleich eine Anpassung der Drehzahlen erfolgt
und man konnte ein schweres
Getriebe verhindern und so die
Achslast
der
Triebachse erneut senken.
Daher konnte
man nur die erwähnte Lösung umsetzen, was jedoch kein Problem darstellen
sollte. So lag die Achslast des Triebradsatzes nur unwesentlich über jener der Laufachse. Sie konnte im gesamten Zug auf einem Wert, der knapp unter 15 Tonnen lag, gehalten werden. Damit waren hier die Vorgaben des Pflichtenheftes eingehalten worden.
Wobei die höchsten Werte ausgerechnet in einem
Fahrzeug, das über keinen
Antrieb verfügte, erreicht wurden. Das so auf die Triebachse übertragene Drehmoment wurde in den Rädern mit Hilfe der Haftreibung zwischen Lauffläche und Schiene in Zugkraft umgewandelt.
Die
hier geltenden physikalischen Grundsätze konnten wegen der geringen
Leistung eines
Fahrmotors und damit der
Triebachse, auch ohne zusätzliche
Massnahmen, wie
Sandstreuein-richtungen, eingehalten werden. Die Zugkraft wurde dann über die Führungen der Achslager und die Mitnehmer auf das Drehgestell übertragen. Ab dort erfolgte der Kraftfluss über den Neigeantrieb auf den Kasten.
Somit erfolgte hier wieder die gewohnte
Übertragung der Kraft. Auf eine
Tiefzugvorrichtung konnte dank dem
gekröpften
Drehgestell verzichtet werden. Das senkte zusätzlich die
Kosten. Da beim Triebzug jedoch keine zusätzlichen Wagen angehängt wurden, wurde die Zugkraft aller Triebachsen in Beschleunigung umgewandelt. Diese Beschleunigung war mit einem Wert von 0.59 m/s2 angegeben worden und daher nicht besonders hoch.
Da es sich jedoch um einen Zug im
Fernverkehr ohne häufige Halte handelte, konnte dieser Wert als Ideal
angesehen werden.
Was
jedoch bei einem
Triebzug wichtiger wird, ist die Steigfähigkeit. Die
maximal befahr-baren Steigungen wurden bei diesem Fahrzeug mit 38‰
angegeben. Damit waren nur wenige Strecken im Netz nicht befahrbar. Für
den halben Zug sank dieser Wert jedoch auf 21‰. Jetzt war es jedoch nicht
mehr möglich die Gotthardstrecke mit dem Zug zu befahren.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2020 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||
 Die
Die
 Dieser zusätzliche Träger wurde zudem nach aussen ausgerichtet, so dass
diese Bauteile sehr nahe bei der
Dieser zusätzliche Träger wurde zudem nach aussen ausgerichtet, so dass
diese Bauteile sehr nahe bei der  Diese
kleineren
Diese
kleineren
 Auch
in engen Bögen standen die
Auch
in engen Bögen standen die
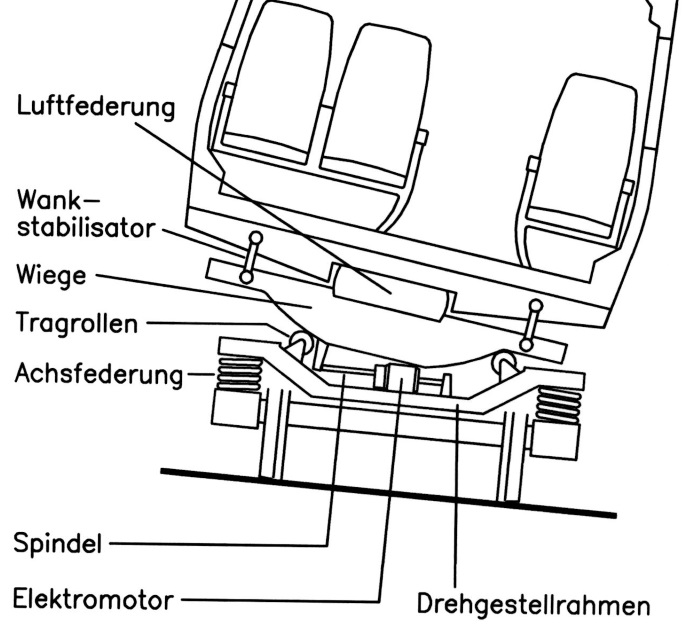
 Erreicht wurde die Neigung mit Hilfe einer Gewindestange, die hier als
Spindel bezeichnet wurde. Diese wurde durch einen Motor in Bewegung
versetzt.
Erreicht wurde die Neigung mit Hilfe einer Gewindestange, die hier als
Spindel bezeichnet wurde. Diese wurde durch einen Motor in Bewegung
versetzt. Da
der Motor nun jedoch die Bewegung des
Da
der Motor nun jedoch die Bewegung des
