|
Bedienung der Lokomotive |
|||||
|
Bei der Bedienung beginnt nun ein Dilemma, denn wer weiss, wie man eine Lokomotive bedient, macht das auch. Dabei kümmert es ihn wenig ob er das darf oder nicht. Das kann ganz schön gefährlich werden. Deshalb werden hier nur die allgemeinen Bedienformen vorgestellt. Das heisst, Sie erfahren, was für eine Steuerung dass es ist, aber nicht, wie man die entsprechend damit ausgerüsteten Lokomotiven genau steuert, denn das sollten Sie den Profis überlassen. Die Profis haben schon genug mit den unterschiedlichen Steuerungen zu kämpfen. Auch damit, dass immer wieder jemand versucht Lokomotivführer zu spielen. Reichen die Simulatoren, die es mittlerweile überall gibt, nicht aus? Dort wird zum Teil sehr realistisch gezeigt, wie man mit einer Lokomotive einen Zug führt. Daher lassen Sie doch das Spielfeld mit der grossen Eisenbahn den Profis, denn nur so bleibt die Eisenbahn auch sicher. Lokomotiven werden nicht, wie ein Auto, seit Jahren mit den gleichen Elementen gesteuert. Bei Lokomotiven gab es im Lauf der Jahre immer wieder Neuerungen und Änderungen, die nicht spurlos an den Lokführer vorbei gingen. Jede Lokomotive, die anders bedient wurde, forderte die Leute wieder, denn eingeübte Abhandlungen stimmten plötzlich nicht mehr. Das kann verwirrend sein, vor allem dann, wenn noch identische Bedienelemente vorhanden sind. Das vermeintliche Lenkrad kam, verschwand, kam erneut und verschwand wieder. Denn ich erwähne es zum letzten Mal. Auf Lokomotiven gibt es kein Lenkrad, die Lokomotive findet den Weg um die Kurve selber. Wenn Sie das nicht wissen, empfehle ich Ihnen die Seite Gleis und Rad bewegt etwas genauer zu lesen. Dort steht, warum die Lokomotive den Weg ohne Schwierigkeiten findet. Ob sie der Lokführer ohne Schwierigkeiten bedient, lassen wir so mal stehen. Damit wir wissen, was für Steuerungen es denn überhaupt gibt, unterscheiden wir drei Grundsteuerungen und die Dampflokomotiven. Das sind Bedienformen, die im Lauf der Jahre entstanden sind. Sie sind schwerer zu erklären, als zu begreifen. Deshalb bringe ich hier mit einem Beispiel etwas Licht ins Dunkel. Dazu nehme ich das Auto. Genau, das Auto, das Sie kennen. Das Auto verfügt über eine Direktsteuerung. Das heisst, Sie drücken die Pedale und drehen am Lenkrad. Das Auto macht nun das, was Sie vorgeben.
|
|||||
|
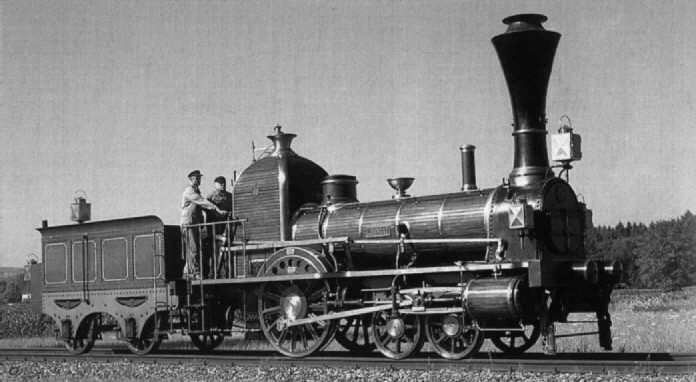
Die Entwicklung der Dampfmaschine ging schnell voran und damit auch die Bedienung der Dampflokomotive. Dabei stellte man sich zwei Fragen. Wo steht wer auf der Lokomotive und was hat er zu tun. Man stellte so schon sehr schnell fest, dass es nur in eine Richtung gehen konnte und man wohl oder übel den Lokführer auf der rechten Seite platzieren musste. Da man in England zu Hause war, konnte man sich damit sehr gut anfreunden, denn die Kutschen wurden ebenfalls rechts bedient. Der Heizer: Ausschlaggebend war bei den Dampflokomotiven der Heizer, denn er legte fest, dass Dampflokomotiven rechts gesteuert wurden. Nein, so gross war die Macht der Heizer auch wieder nicht, aber die Natur half ihnen dabei. Versuchen Sie einmal Kohlen in eine enge Tür zu werfen. Nein, dazu benutzen Sie natürlich eine Schaufel. Gut und jetzt wechseln Sie die Seite. Spätestens jetzt wissen Sie, warum eine Dampflokomotive rechts bedient wird.
Die linke Seite war somit für den Heizer reserviert. Deshalb blieb dem Lokführer nichts anderes übrig, als die ungünstige rechte Seite zu benutzen. Der Lokführer konnte nämlich flexibel angeordnet werden. Er war einfach nur dort, wo er Platz fand und verrichtete dort seine Arbeit. Bevor wir zum Lokführer kommen, bleiben wir vorerst beim Heizer. Die Bedienung der Lokomotive durch den Heizer begann mit dem Anfachen des Feuers. Ohne dieses Feuer funktionierte die Lokomotive nicht. Damit man die Lokomotiven starten konnte, wurden einige Gegenstände benötigt. Neben dem normalen Brennmaterial, musste der Heizer einige Teile auf der Arbeit mitführen. Dazu gehörten Streichhölzer und ein mit Petrol getränkter Lappen. Mit Petrol oder genauer Petroleum und dem Streichholz, konnte das Feuer in der Feuerbüchse angefacht werden. Petroleum ist ein Produkt, das aus raffiniertem Erdöl entsteht und dort bei der Wertung zwischen Diesel und Benzin angeordnet wird. Petrol ist nicht so gut brennbar, wie Benzin, was es etwas sicherer macht. Daher ist Petroleum ein bei der Luftfahrt verwendeter Treibstoff. Die Gefahrgutkennung von Petroleum lautet 30 – 1223. Später wurde die Vorschrift gelockert und der Heizer fand Petrol, das nun Leuchtpetrol genannt wurde, auf der Lokomotive. Die Beleuchtung der Lokomotive wurde nach einem Verbot von Kalziumkarbid auf Petrol umgestellt. Daher bezeichnete man Petrol in der Folge auch als Leuchtpetrol. Das war auf der Lokomotive vorhanden und so musste es der Heizer nicht mehr mitführen. Was den Kleidern sicherlich gut bekam. Der Lokführer: Beim Lokführer galt, dass zu Zeiten der Dampflokomotiven niemand auf die effektive Bedienung achtete. So war fast jede Serie unterschiedlich und die Hersteller brachten es sogar fertig, Lokomotiven innerhalb der Serie so zu verändern, dass sich die Bedienung anders darstellte. In den Grundzügen blieb aber alles gleich. Man benutze zum bedienen der Lokomotive zwei Hebel, wobei je nach Bauart der Lokomotive mit dem einen oder anderen Bedienelement gefahren wurde. So wurde zuerst einem Regler der Druck in der Dampfleitung reguliert. Dazu hatte der Lokführer den Regulator. Er konnte damit die grundsätzliche Zugkraft vorgeben. Mit dem Regulator regelte der Lokomotivführer daher die Entnahme des Dampfes. Ideal war, wenn er so viel Dampf entnahm, dass der Kessel diesen zu einem guten Teil wieder ergänzen konnte. Dabei blieb es auch. Wie es der Name schon sagt, man regulierte mit dem Regulator. Die Fahrt der Lokomotive regelt hingegen die Steuerung der Dampfmaschine. So konnte mit der Dampfmaschine die Öffnung geregelt werden. Daher konnte nun der Lokführer sehr fein die Dampfmaschine und deren Geschwindigkeit einstellen. Die maximal mögliche Zugkraft gab der Regulator vor. Die Bewegung selber, wurde durch die Steuerung der Dampfmaschine geregelt. Daher spricht man vermutlich auch heute noch von einer Steuerung der Lokomotive. Es wurde daher mit der Steuerung und dem Regulator gefahren. Wie das genau gemacht wurde, überliessen die Konstrukteure natürlich dem Lokführer. Man erklärte einfach, dass die Steuerung die Richtung vorgibt und der Regulator die Zugkraft regelt. Wie letztlich gefahren wurde, hing von der Zugänglichkeit der Bedienelement ab. Daher war man schnell bei der Steuerung, denn die war sehr gut zugänglich und konnte sehr gut geregelt werden. Klar ist, dass viele Lokführer mit der Steuerung und dem Regulator experimentierten, denn wie reagiert die Lokomotive, wenn die Steuerung etwas zurückgenommen wird? Schon erkannte man, dass die Lokomotive viel sanfter reagierte und eine Änderung des Regulators nicht brutal einschlug. Die Lokführer erkannten so schnell die genaue Funktion jeder einzelnen Dampfmaschine. Es wurde damals also noch mit sehr viel Gefühl gefahren. Etwas, was mit den Jahren in Vergessenheit geraten ist.
|
|||||
|
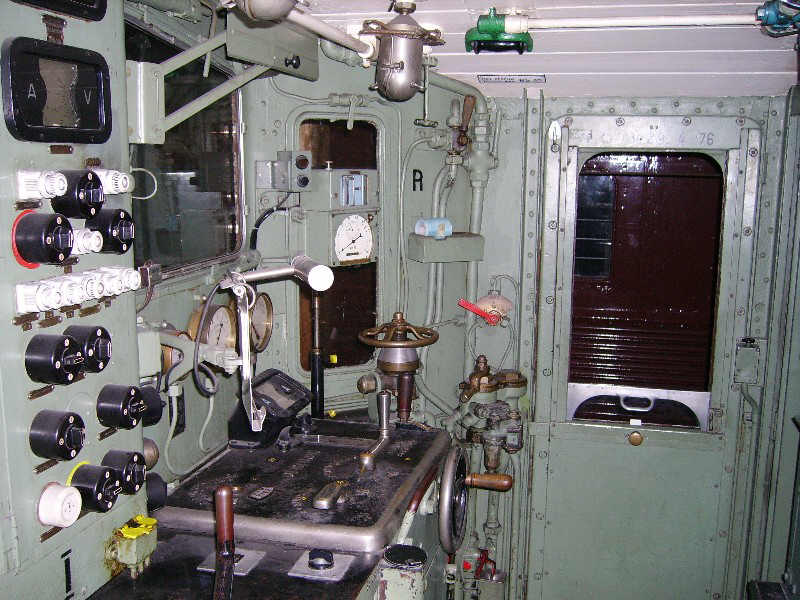
Kommen wir nun zu den elektrischen Lokomotiven oder den Modellen mit einem Dieselmotor. Die Steuerung dieser Lokomotiven unterschied sich deutlich von den Methoden, die bei den Dampflokomotiven angewendet wurden. Die ersten Lokomotiven hatten dabei noch eine Steuerung, die wir einmal als Direktsteuerung bezeichnen. Geläufiger ist jedoch die Bezeichnung direkte Steuerung. Nur damals machte man diese Unterscheidung nicht, denn es gab nur diese Steuerung. Die direkte Beeinflussung der elektrischen Lokomotive war nur logisch. Zu jener Zeit gab es weder Autos noch moderne Verkehrsmittel wie Flugzeuge. Wir sind also in den Jahren kurz nach 1900, also zu einer Zeit, wo noch viel experimentiert wurde. Gerade beim erwähnten Strassenverkehr konnte sich die direkte Steuerung durchsetzen. Bei den Lokomotiven gab es später eine Verbesserung, die die Bedienung erleichterte. Doch beginnen wir mit der ersten direkten Steuerung. Die Stufenschaltersteuerung: Lokomotiven, die mit der hier erwähnten Stufenschaltersteuerung ausgerüstet wurden, hatten einen Stufenschalter, der die Fahrstufen regulierte. Das heisst, wir haben eine Einrichtung, die bewegt werden muss. Dazu gab es anfänglich nur eine Lösung, denn die Befehle wurden mechanisch übermittelt. Damit die drehende Bewegung umgesetzt werden konnte, benötigte man ein Handrad.
Bei den ersten Lokomotiven verwendete man noch eine möglichst direkte Form. Das heisst, der Lokführer musste an einem Handrad eine Umdrehung machen um eine Stufe zu schalten. Sie können sich das in etwa so vorstellen, wie ein Bediener einer Drehorgel. Der Lokführer wurde so zum Drehorgelspieler. Die Schaltungen mit diesem Handrad waren nicht befriedigend. Die einzelnen Fahrstufen konnte so nur mit viel Aufwand geschaltet werden. Stellen Sie sich vor, die 20 Fahrstufen mussten herunter gedreht werden. Das bedingte mit dem Handrad 20 Umdrehungen. Das konnte in gewissen Situationen gefährlich werden, dazu benötigte man eine zusätzliche Einrichtung, denn die konnte das Lokomotivpersonal etwas von der Hektik befreien. Damit man in Notsituationen eine schnelle Abschaltung ermöglichen konnte, war ein Notschalter vorhanden. Wurde dieser Hebel gezogen, wurde die Stromzufuhr zum Stufenschalter unterbrochen. Die einzelnen Fahrstufen konnten nun in aller Ruhe und stromlos abgeschaltet werden. Diese Notabschaltung funktionierte gut. Der Begriff wird heute oft in einem anderen Zusammenhang genannt, aber er hat immer noch die gleiche Funktion. Mit dem Umzug des Handrades auf den Führertisch und der Einführung der Rasterschaltung, änderte sich auch die Bezeichnung. Man sprach nun von einem Stufenkontroller. Damit eine Stufe geschaltet wurde, musste nun nicht mehr eine volle Umdrehung gemacht werden. Es reichte, wenn man den Stufenkontroller um eine Stufe verdrehte. Der Stufenschalter führte anschliessend die Aufgabe aus. Man konnte nun aber auf leichte Weise eine bestimmte Fahrstufe vorwählen. Der Stufenschalter folgte in seinem Arbeitstempo dem Stufenkontroller. Das erfolgte zumindest so lange, bis ein Relais die Ströme der Fahrmotoren als bedrohlich ansah und die Lokomotive ausschaltete. Man musste daher wissen, wenn man die Stufe vorwählte, was für eine Zugkraft dabei erwartet werden kann. Daher darf die Regelung nicht mit der später noch vorgestellten Nachlaufsteuerung verwechselt werden. Der Lokführer musste deshalb beim Stufenkontroller und der damit eingeführten Regelung immer auf den Fahrmotorstrom achten und nach diesem die einzelnen Fahrstufen zuschalten. So kam es, dass die Lokführer die Stufen schön Schritt für Schritt hoch geschaltet haben. Dabei natürlich immer mit einem Auge auf der Anzeige für den Fahrmotorstrom. Daher war eine manuelle direkte Steuerung vorhanden, die gut funktionierte. Die Fahrstufen wurden aber grundsätzlich mit dem „Schnellgang“ abgeschaltet. Dazu stellte der Lokführer das Handrad auf Stufe 1 und wartete, bis der Stufenschalter ebenfalls zu dieser Stufe gefunden hat, erst danach öffnete er die Trennhüpfer. Hatte man es besonders eilig, ging man gleich auf 0 und öffnete so die Trennhüpfer, der Stufenschalter konnte dann in aller Ruhe die einzelnen Fahrstufen runter kurbeln. Die Hüpfersteuerung: Wer bei den Eisenbahnen einen Ferrari oder einen Rennwagen sucht, der findet ihn bei Lokomotiven die mit einer Hüpfersteuerung ausgerüstet wurden. Bei der Geschwindigkeit war diese Steuerung unschlagbar und es sollte keine Steuerung mehr geben, die schneller funktioniert. Daher lohnt es sich sicherlich, wenn wir uns diese Hüpfersteuerung genauer ansehen. Dabei beginnen bei dieser Steuerung die Probleme schon beim Namen. Wurden die einzelnen Fahrstufen einer Lokomotive mit elektromagnetischen statt mit elektropneumatischen Schaltelementen ausgeführt, nannte man die Steuerung Schützensteuerung. Bei der Bedienung oder dem Tempo der Steuerung änderte sich dadurch nichts. Ich werde deshalb im weiteren Verlauf dieses Artikels von der Hüpfersteuerung sprechen. Sie können, sofern Sie das wollen, einfach Hüpfer durch Schütz ersetzen. Denn das ist wirklich der einzige Unterschied.
Dabei war die Ableitung von der Batterie gekommen. Dort arbeitete man auch mit mehreren nebeneinander liegenden Zellen um die Batterie zu erstellen. Bei den Hüpfern war das ja auch der Fall. Letztlich wurde die Hüpferbatterie aber von einem Steuerkontroller beeinflusst. Geregelt wurde die Hüpfersteuerung mit einem Steuerkontroller. Diese konnte man optisch kaum vom Stufenkontroller unterscheiden. Die Bedienung war jedoch ganz anders, denn die Hüpfersteuerung reagierte blitzschnell auf die Handlung beim Steuerkontroller. Man schaltete die Fahrstufen direkter als direkt und natürlich gab es keine Überwachung des maximalen Fahrmotorstromes. Stellte der Lokführer die Fahrstufe 5 ein, war die sofort eingeschaltet. Die entsprechend der Fahrstufe benötigten Hüpferkombinationen waren gleich im Führertisch am Steuerkontroller angebracht worden. Dadurch wurden die Fahrstufen entsprechend der Stellung beim Steuerkontroller eingeschaltet. Eine schnellere Lösung sollte es nie mehr geben und hätten es die Relais der Fahrmotoren mitgemacht, hätte jede Lokomotive mit Hüpfersteuerung ein Wettrennen mit einem Sportwagen aufgenommen und vermutlich nicht immer verloren. Wie schnell die Hüpfersteuerung wirklich war, zeigt ein Beispiel: Gemäss Vorschrift musste man die vier ersten Fahrstufen bei der Lokomotive Re 4/4 I schnell schalten. Das sollte natürlich zur Schonung der Lokomotive schrittweise erfolgen. Nur, wer in Intschi die Schulklasse ausgeladen hatte und mit der Re 4/4 I und dem Pendelzug losfahren wollte, kümmerte sich wenig darum. Die vierte Stufe wurde sofort reingeknallt und eventuell noch die fünfte nachgeschaltet. Pech war, wenn das Fahrmotorrelais etwas schneller war, als die sich drehenden Fahrmotoren. Warum das schnell sein soll? Nun, haben Sie die Schaltung der Fahrstufen 1 bis 3 mitbekommen? Nicht, dann sollten Sie vermutlich etwas schneller lesen. Wobei auch dann wären Sie noch zu langsam, denn mit dem Drehen des Steuerkontrollers auf die Stufe vier, war diese eingeschaltet. Es gab keine Verzögerung. Gedrosselt wurde die Steuerung nur durch den Lokführer. Daher ging die Lokomotive oft recht rassig auf die Reise.
|
|||||
|
Die Stromwertsteuerung |
|||||
|
Die bisherigen direkten Steuerungen hatten ein Problem. Es gab keine automatische Beschränkung der Fahrmotorenströme. Die Lokführer orgelten den Stufenschalter hoch und das Relais der Fahrmotoren löste den Hauptschalter aus. Die alternative Hüpfersteuerung war auch hier etwas schneller, denn es knallte sofort, wenn der maximal erlaubte Fahrmotorstrom überschritten wurde. Zwar hatte man sich daran gewöhnt und es funktionierte gut. Aber man wollte bei der Bedienung eine Erleichterung erreichen. Die Idee der Erbauer und Konstrukteure war, dass man die Stufenschalter oder auch die Hüpfer weiter zur Regelung der Zugkraft verwenden kann. Nun sollte aber eine Einrichtung eingeführt werden, die den Stromwert an den Fahrmotoren überwacht. Damit sollten die unbegründeten Störungen mit den Fahrmotoren ein Ende finden. Zudem vereinfachte diese Art der Steuerung die Verdrahtung der Steuerung. Daher führte man die stromwertbezogenen Steuerungen auf den Lokomotiven ein. Die Befehlsgebersteuerung: Mit den Triebwagen RBe 4/4 kam eine neuartige Steuerung in die Lokomotiven und Triebwagen. Der Lokführer konnte damit keine bestimmten Fahrstufen mehr einstellen. Das Personal, das sich bisher mit einzelnen Fahrstufen auseinander setzen musste, war eher skeptisch über diese neuartige Steuerung. Bisherige Versuche verliefen immer wieder mit grossen Problemen. Daher ging man davon aus, dass diese Steuerung wieder verschwinden wird.
Die Lokführer der einzelnen Bahnen freundeten sich vermutlich sehr schnell an, denn es war nun ein unvergleichbarer Komfort bei der Beschleunigung und der Regelung der Zugkraft vorhanden. Die Befehlsgebersteuerung hatte gegenüber den bisherigen Steuerungen zwei grundlegende Unterschiede. Die Steuerung überwachte die maximalen Ströme an den Fahrmotoren selber, der Lokführer musste also nicht mehr an das Relais denken, das den Fahrmotorstrom beschränkte. Bei der Beschleunigung war das sehr hilfreich, denn der Lokführer musste nicht immer auf die Anzeigen sehen und konnte sich der Streckenbeobachtung zuwenden. Fehlerhafte Auslösungen bei den Fahrmotorstromrelais gab es daher auch nicht mehr. Der Lokführer hatte aber keine Information über die eingestellte Stufe. Bisher wusste das Personal, dass mit der Lokomotive diese Strecke mit der achten Fahrstufe befahren werden muss. Das war nun vorbei, der Lokführer musste sich anhand der Zugkraft orientieren. Das war aber nach einer kurzen Umgewöhnung schnell kein Problem mehr und die Befehlsgebersteuerung arbeitete sehr gut und wurde vom Personal akzeptiert. Die Befehlsgebersteuerung wurde mit einem Fahrschalter oder in seltenen Fällen mit einem Handrad bedient. Der Schalter war einfach einen Hebel, den man nach vorne oder hinten bewegen konnte. Das Handrad bewegte man nicht mehr in gewohntem Stil, sondern man stellte es einfach auf die angegebene Stellung. Das Handrad wurde so zum Fahrschalter. Meistens setzte sich jedoch der seitliche Fahrschalter durch. Dabei war es auf diesen Lokomotiven durchaus möglich, die Befehlsgebersteuerung auszuschalten und nach alter Methode mit Direktsteuerung zu fahren. Geschickte Lokführer fuhren die Lokomotive aber auch mit der Direktmethode, beliessen aber die maximale Begrenzung der Ströme der Steuerung eingeschaltet. So gelang es Fahrstufe um Fahrstufe zu schalten. Gerade im Güterverkehr arbeitet man mit dieser Form recht oft, war es doch bei gewissen Kombinationen von Fahrzeugen vorgeschrieben. Die Schulung lehrte dem Personal, dass man zum anfahren, mit einem Plusplus-Kick gleich drei Stufen schalten sollte. Diese Methode wurde dem Personal verinnerlicht. Wählte man die Plusplus-Methode bei der Lokomotive Re 6/6, fuhr die Lokomotive zwar los, der Zug blieb aber stehen. So bürgerte sich die stufenweise Anfahrt auch beim Personenverkehr ein. Wenn dann der Zug rollte und der Strom angestiegen war, konnte man der Steuerung den Befehl geben und sie schaltete dann fröhlich zu. Natürlich erst, wenn der Fahrmotorstrom dies erlaubte. Die Nachlaufsteuerung: Die neuartige Nachlaufsteuerung arbeitete mit einem Stufenkontroller und einem Stufenschalter, wie das bei der Stufenschaltersteuerung bei den direkten Steuerungen schon erwähnt wurde. Hinzu kam nun aber die Stromwertbegrenzung. Das heisst, die Steuerung griff auf den Stufenkontroller ein und übernahm gewisse Funktionen, wie wir sie bei der vorher vorgestellten Befehlsgebersteuerung kennen gelernt haben. Bei der Nachlaufsteuerung hatte der Lokführer die gewohnten Fahrstufen noch. Er konnte also, wie er sich das gewohnt war, jede Fahrstufe einzelnen Schalten und die für die Strecke passende Fahrstufe einstellen. So ergaben sich keine Änderungen zur direkten Steuerung mit dem Stufenschalter. Neu hingegen war, dass die Technik die Stromwerte automatisch beschränkte. Daher erkläre ich das an einem Beispiel. Beim Fahren wählte der Lokführer eine bestimmte Fahrstufe. Das konnte zum Beispiel die Fahrstufe 15 sein. Danach liess er den Stufenkontroller stehen und wartete auf die Steuerung und deren Reaktion. Die Nachlaufsteuerung schaltete nun die Fahrstufen bis zum maximal zulässigen Fahrmotorstrom. Erst, wenn dieser Strom wieder eine Zuschaltung erlaubte, wurde die nächste Fahrstufe zugeschaltet. Das ging so lange, bis die vom Lokführer gewählte Fahrstufe erreicht war. Hier findet sich auch der Grund für den Namen. Die Nachlaufsteuerung bot zwar den Vorteil der Befehlsgebersteuerung, erlaubte es dem Lokführer aber die gewohnten Stufenzahlen zu verwenden. Die enthaltene Befehlsgebersteuerung schaltet automatisch unter Einhaltung der erlaubten Stromwerte nach. So war der Lokführer zumindest von der Einhaltung der Stromwerte entlastet. Der Nachlauf dieser Steuerung hing vom Stufenschalter ab. Bei einer Hüpfersteuerung kamen keine Nachlaufsteuerungen zur Anwendung. Beim Abschalten der Fahrstufen reagiert die Nachlaufsteuerung ganz normal und entspricht daher der Stufenschaltersteuerung. Für den Lokführer gab es jetzt zum Stufenschalter keinen Unterschied. So gut die Nachlaufsteuerung auch war, die Befehlsgebersteuerung war etwas besser geraten. Daher verwendeten die schweizerischen Bundesbahnen SBB keine Nachlaufsteuerung. Die Lokführer der SBB arbeiteten mit der Befehlsgebersteuerung, wobei auch die abgelöst wurde.
|
|||||
|
Um es vorweg zu nehmen, es gibt keine Geschwindigkeitssteuerung, ohne das dazu noch eine Befehlsgebersteuerung vorhanden wäre. Grundsätzlich arbeitet so eine auf die Geschwindigkeit abgestimmte Steuerung mit den Erkenntnissen, die man schon bei der Befehlsgebersteuerung gemacht hatte. Nur nimmt man jetzt zur Regelung der Schaltelemente auch die Geschwindigkeit dazu. So erhalten wir eine Steuerung, die die Zugkraft anhand der Geschwindigkeit regelt. Wie stark diese neuartige Geschwindigkeitssteuerung in der bisherigen Steuerung eingebunden ist, hängt vom verwendeten Fahrzeug und natürlich vom Hersteller ab. So gibt es Lokomotiven, die nur mit der Geschwindigkeitssteuerung gefahren werden und Lokomotiven, bei denen diese zuerst zugeschaltet werden muss. Grund genug, sich um diese Steuerungen zu kümmern. Dabei kommt zuerst eine Steuerung, die beide Arten sogar kombiniert, zur Vorstellung. Die Charakteristiksteuerung: Die Charakteristiksteuerung ist eine Kombination von Zugkraftvorgaben und Geschwindigkeitsregelung. Die Steuerung baut auf der Tatsache auf, dass der Lokführer bei der Beschleunigung nur die Stromwerte braucht. Erst später kommen dann die Funktionen für die Geschwindigkeitsregelung zur Anwendung. Eine etwas futuristisch anmutende Lösung, die aber komplizierter klingt, als sie ist. Das Personal gewöhnt sich schnell an diese Steuerung. Bedient wurde diese Steuerung mit einem Handrad. Dieser Steuerkontroller hatte jedoch keinen Stufen mehr angeschrieben, sondern nur noch eine Skala, die Sie vermutlich von der Lautstärkeregelung am Radio her kennen. Diese Steuerung nutzte die Charakteristik der Fahrmotoren und war daher von den Motoren abhängig. Deshalb konnten hier keine klassischen Schaltungen mehr verwendet werden. Die hier vorgestellte Charakteristiksteuerung arbeitete daher mit speziellen Schaltelementen. Die mit Thyristoren aufgebauten Steuerungen nennt man Thyristorsteuerung. Diese benötigen um bedienerfreundlich zu bleiben eine Steuerung, wie es die Charakteristiksteuerung bietet. Die schnellen Schaltfolgen der Steuerung, werden durch Rechner gesichert, daher kann man auch den Rechner mit speziellen Lösungen der Steuerung füttern. Die Folge waren Steuerungen, die mit unterschiedlichen Werten arbeiten. Dazu gehört die Charakteristiksteuerung, die wir hier betrachten. Gerade die mit der Thyristorsteuerung aufgebauten Fahrzeuge mit Phasenanschnittsteuerung zeigen deutlich, wie die moderne Technik, zu neuen und modernen Lösungen bei der Steuerung der Lokomotive führte. Man hatte keinen Stufenwähler, den man mehr regeln musste, daher konnte man andere Lösungen und so die Charakteristiksteuerung einführen. Man hatte eine Steuerung mit unterschiedlichen Charakteristiken. Die Charakteristiksteuerung benötigte deshalb die technischen Phasenanschnitt- oder Thyristorsteuerungen um korrekt zu funktionieren. Denn da gab es keine Fahrstufen mehr, die berücksichtigt werden mussten. Durch den mit den Thyristoren einstellbaren Phasenanschnitt konnte die Steuerung die feine, durch die Geschwindigkeit beeinflusste, Vorgabe leichter umsetzen. So wurden die Eigenschaften der Fahrmotoren optimal ausgenutzt. So arbeitete die Charakteristiksteuerung im normalen Befehlsgebermodus und schaltete den Geschwindigkeitsmodus erst bei höheren Geschwindigkeiten zu. Daher könnte man diese Steuerung auch noch zu der Befehlsgebersteuerung schlagen, da aber eine variable und nicht festgelegte Geschwindigkeitskomponente bei der Charakteristiksteuerung vorhanden ist, leitet sie uns in die Welt der richtigen Geschwindigkeitssteuerungen ein. Einen kleinen Schritt weiter ging man dann bei den schweizerischen Bundesbahnen SBB, denn man verwendete dort eine Charakteristiksteuerung mit voll integrierter Geschwindigkeitsteuerung. Wie das wieder gehen soll? Diese Fahrzeuge regelten mit dem Fahrschalter der Befehlsgebersteuerung die Zugkräfte analog der Charakteristiksteuerung, konnten aber jederzeit auf die Geschwindigkeitssteuerung wechseln. So hat zum Beispiel der RBDe 560 diese Kombination.
Der Lokführer hat durch Stress vergessen, dass er einen RBDe 560 bedient und stellt den Fahrschalter, um ein Zuschalten der Stufen zu verhindern, aus reiner Routine auf ●. Der Zug wechselt nun sofort in die Geschwindigkeitsregelung und beschleunigt nicht mehr weiter. Hat sich der Lokführer aber an die geänderten Funktionen gewöhnt, fährt er den Triebwagen RBDe 560 automatisch, wie wenn er eine normale Charakteristiksteuerung hätte. Das ging in etwa so: Anfahrt des Zuges mit der Zugkraftvorgabe und weitere Beschleunigung unter der automatisch geregelten Zugkraft, die den Wünschen mit Hilfe von Befehlen angepasst werden konnte. Wir haben hier den Teil der schon bekannten und vorgestellten Befehlsgebersteuerung. Der Lokführer regelt die Zugkraft so, wie er sich das von den anderen Lokomotiven mit klassischen Lösungen gewohnt war. Unterschiede gab es bisher keine, aber das ändert sich nun. Kurz bevor die Geschwindigkeit erreicht wurde, stellte der Lokführer den Fahrschalter in die Stellung für die Geschwindigkeitsteuerung und das Fahrzeug wechselte automatisch in diesen Modus. Die Zugkraft wurde anhand der Strecke gesteuert und so die Geschwindigkeit beibehalten. Der Zug fuhr die eingestellte Geschwindigkeit, so lange, bis keine Zugkraft mehr benötigt wurde. Danach fiel die Steuerung aus, weil die notwendigen Umstellungen beim Fahrzeug noch fehlten. Die Zugkraft abgeschaltet wurde entweder im Geschwindigkeitsmodus, oder in der Befehlsgebersteuerung. Der Lokführer konnte daher bei der hier gezeigten und vorgestellten der Charakteristiksteuerung die Geschwindigkeit nicht direkt wählen. Der nächste Schritt sollte daher in den Bereich der vollen Regelung durch die Geschwindigkeit führen. Die Geschwindigkeit sollte daher noch mehr in den Vordergrund rücken. Die Geschwindigkeitsregelung: Je weiter bei der Steuerung die Geschwindigkeit Einfluss nimmt, desto eher wird aus der Charakteristiksteuerung eine echte Geschwindigkeitssteuerung, die ich hier als Geschwindigkeitsregelung bezeichne. Das führt dazu, dass man bei solchen Fahrzeugen schnell vergisst, dass sie eigentlich auch mit der Zugkraftvorgabe gefahren werden können. Daher lohnt es sich sicher, wenn wir in die Welt der von der Geschwindigkeit abhängigen Steuerungen blicken.
Wobei ich hier klar erwähnen muss, dass diese Lokomotive kaum anders gesteuert wurde, denn die Regelung der Geschwindigkeit war so präsent, dass man leicht vergessen konnte, dass es auch anders geht. Bei dieser Steuerung konnte der Lokführer die gewünschte Geschwindigkeit mit einem eigenen Schieberegler vorwählen. Danach brauchte er nur noch die notwendige Zugkraft vorzugeben und die Lokomotive beschleunigte bis zum vorgegebenen Wert. Danach behielt die Steuerung diese Geschwindigkeit ohne weitere Einschränkungen ein. Selbst der Wechsel in den elektrischen Bremsbetrieb erfolgte ohne Einflussnahme durch das Lokomotivpersonal. Die Bedienung mit Schieberegler war natürlich nicht zwingend und konnte immer dem Wunsch des Kunden angepasst werden, sie wurde einfach bei unserer Musterlokomotive verwendet. Jedoch kann ich sagen, dass die anderen Bedienelemente dem Schieberegler entsprechen und es daher kaum zu anderen Lösungen gekommen war. Sie müssen einfach wissen, dass es eine eigene Vorrichtung gab, die die gewünschte Geschwindigkeit vorgab. Wollte man im gewohnten Stil mit der Befehlsgebersteuerung arbeiten, hatte man einen Schieberegler für die Zugkraft. So konnte man die Zugkraft, die von der Lokomotive erbracht wird, begrenzen. Jedoch war klar die Regelung durch die gewünschte Geschwindigkeit im Vordergrund. Wir hatten aber immer die eingeführte Geschwindigkeitsregelung im Hintergrund. Nur gab diese als Ziel die Höchstgeschwindigkeit der Lokomotive vor. Wollte man nun langsamer werden, zog man einfach den Schieberegler für die Geschwindigkeit auf den neuen Wert. Die Lokomotive bremste nun automatisch bis die neue Geschwindigkeit erreicht war. Das klappte natürlich ganz gut und so war das Lokomotivpersonal schnell im Element, denn ich wähle 100 und die Lok fährt 100. Will ich auf 80, macht die Lok 80. Das war wunderbar und erst noch komfortabel. Das weckte jedoch die Experimentierfreudigkeit des Lokpersonals. Um die Experimentierfreudigkeit des Lokomotivpersonals mit der neuartigen Steuerung ein wenig einzudämmen, baute man solchen Lokomotiven eine Fahrsperre ein. Die Fahrsperre verhinderte eigentlich nur, dass man den Zug bremsen konnte und vorne auf der Lokomotive weiterhin Zugkraft aufgebaut werden konnte. Diese schon sehr früh eingeführte Sicherheitsmassnahme zeigt sich anhand eines Beispiels sehr gut auf. Wir fahren mit der Geschwindigkeitsvorgabe 100 und voller Zugkraft. Die Lokomotive hält die Geschwindigkeit mit 100. Eine Kurve lässt jetzt nur 80 zu. Damit wir wieder einmal die Bremsen benutzen, bremsen wir den Zug mit der Luft ab. Abgelenkt durch einen Funkspruch vergessen wir die Zugkraftvorgabe. Ohne Fahrsperre würde der Zug nach dem lösen der Bremse automatisch wieder auf 100 beschleunigen, das obwohl wir in einer Kurve sind, die nur 80 erlaubt. Die Automatische Fahr-/Bremssteuerung: Ich will mich nicht weiter mit einem Begriff abfinden, der so lange wie die automatische Fahr- und Bremssteuerung ist. Daher kürze ich den Begriff mit der offiziellen Abkürzung ab. In Zukunft spreche ich daher nur noch von AFB. Das machten auch andere, die vermutlich nicht gerne lange Worte schreiben. Trotzdem sollten wir uns diese AFB genauer ansehen, denn Sie werden überrascht sein.
Dies obwohl die AFB noch viel weiter geht als die bisherigen Systeme. Wenn die AFB nicht aktiviert wurde, wird die Lokomotive mit den bekannten Zugkraftvorgaben gesteuert. Das können wir letztlich mit der bekannten Befehlsgebersteuerung vergleichen. So ging man mit dieser Steuerung wieder einen Schritt zurück und überlässt es nun dem Lokführer, den gewünschten Modus zu wählen. Sie werden es vermutlich nicht glauben, aber viele Lokführer lassen die Finger von der AFB und arbeiten mit dem etwas mühsameren Befehlsgebermodus. Der Grund dafür liegt beim Gefühl für den Zug, denn die Lokführer geben an, dass sie das Gefühl für den Zug mit der klassischen Befehlsgebersteuerung besser hätten, als mit den modernen Lösungen. Wird die AFB zugeschaltet, hat der Lokführer die Marke für die Geschwindigkeit, wie es sie bei jeder Geschwindigkeitsregelung gibt und kann die Geschwindigkeit einstellen. So wird die Lokomotive nun mit der manuell eingeschalteten und eingestellten Geschwindigkeitssteuerung fahren. Der Unterschied zu anderen Geschwindigkeitsteuerungen ist, dass die AFB den Zug anhand der Eingabe des Gewichtes optimaler beschleunigt und dabei sogar noch Kupplungen der Wagen entlastet. Sie greift jedoch auch auf die pneumatischen Bremsen zurück, wenn sie das muss. Die volle Leistung der AFB wird erst mit der Kombination der LZB offen gelegt. Jetzt arbeitet die AFB autonom. Das heisst, die Steuerung bremst automatisch auch auf vorgeschriebene Halte. Dazu macht die AFB auch von der Luftbremse Gebrauch. Nach dem bremsen erfolgt auch wieder eine automatische Beschleunigung. Der Zug fährt somit automatisch. Daher auch die Bezeichnung AFB. So gesehen war die AFB ein Schritt zum Führerstand ohne Lokführer. Aber eben, man kann die AFB auch jederzeit wieder ausschalten. Ich zeige das an einem Beispiel. Die Fahrt führt mit einem Zug über den Gotthard. Bergauf ist die AFB eingeschaltet und die Lokomotive hält die erlaubte Geschwindigkeit ohne zutun des Lokführers. Nach dem Gotthardtunnel wird die AFB wieder ausgeschaltet und der Zug fährt im Befehlsgebermodus die Steilrampe runter. Das aus dem einfachen Grund, weil das vorgeschrieben und etwas bequemer ist. Damit haben wir die Möglichkeiten auf der Lokomotive abgeschlossen. Wir sind jedoch noch nicht am Ende der Steuerung angelangt. Die Steuerung der Lokomotive erlaubt bei der entsprechenden Gestaltung auch eine Bedienung ab einem anderen Fahrzeug. Der Lokführer sitzt dabei nicht mehr im Fahrzeug und er steuert es von einem anderen Fahrzeug aus. Diese Lösung wollen wir uns nun bei der Vielfachsteuerung genauer ansehen.
|
|||||
| Zurück | Navigation durch das Thema | Weiter | |||
| Home | Depots im Wandel der Zeit | Die Gotthardbahn | |||
| News | Fachbegriffe | Die Lötschbergbahn | |||
| Übersicht der Signale | Links | Geschichte der Alpenbahnen | |||
| Die Lokomotivführer | Lokführergeschichte | Kontakt | |||
|
Copyright 2015 by Bruno Lämmli Erstfeld: Alle Rechte vorbehalten |
|||||
 Es
ging Ihnen nach dem Wechsel über die Hand. Könnten Sie so gute Arbeit
leisten und ein Feuer optimal bewirtschaften? Sehen Sie, die
Es
ging Ihnen nach dem Wechsel über die Hand. Könnten Sie so gute Arbeit
leisten und ein Feuer optimal bewirtschaften? Sehen Sie, die
 Um die einzelnen
Um die einzelnen
 Die
Die
 Die Lokführer sollten
Recht bekommen, denn diese Steuerung verschwand wieder. Zuvor wurde sie
aber auf über 1‘000 Fahrzeugen eingebaut und Lokführer vieler
Die Lokführer sollten
Recht bekommen, denn diese Steuerung verschwand wieder. Zuvor wurde sie
aber auf über 1‘000 Fahrzeugen eingebaut und Lokführer vieler
 Verwendet hat man hier
unglücklicherweise die Elemente der beim Personal schon bekannten
Befehlsgebersteuerung. Sie müssen sich das so vorstellen.
Verwendet hat man hier
unglücklicherweise die Elemente der beim Personal schon bekannten
Befehlsgebersteuerung. Sie müssen sich das so vorstellen. Ich wähle hier die
Lokomotive
Ich wähle hier die
Lokomotive  Hier handelt es sich um
eine manuell zuschaltbare Geschwindigkeitssteuerung. Sie haben richtig
gelesen, sie wird manuell zugeschaltet und steht normalerweise auf der
Lokomotive nicht zur Verfügung.
Hier handelt es sich um
eine manuell zuschaltbare Geschwindigkeitssteuerung. Sie haben richtig
gelesen, sie wird manuell zugeschaltet und steht normalerweise auf der
Lokomotive nicht zur Verfügung.