|
Beleuchtung und Steuerung |
|||
| Navigation durch das Thema | |||
|
Ein Grundsatz änderte sich eigentlich beim Bau von
Lokomotiven nie. Es ist das von der
Spannung
in der
Fahrleitung
unabhängige
Bordnetz.
Dieses wurde benötigt um wichtige Funktionen jederzeit verfügbar zu
halten. Dazu gehören neben einigen Punkten der Steuerung auch die
Beleuchtung.
Es sollte ja nach einer betrieblichen Auslösung des
Hauptschalters
nicht gleich dunkel werden. Bevor wir dazu kommen, sehen wir die
Versorgung an.
Jedoch gab es Probleme beim Gewicht, denn Blei ist auch als Bleioxyd sehr schwer. Zudem wurde ein Elektrolyt benötigt. Gerade dieses verlangte nach einer regelmässigen Wartung. Mit den neusten Modellen konnte das bisher flüssige Elektrolyt durch ein spezielles Gel ersetzt.
Diese eliminierte die regelmässige Wartung und auch der
gefürchtete Ausstoss von
Was-serstoff gab es nicht mehr. Jedoch mussten diese
Bleibatterien
immer noch ersetzt wer-den, denn bedingt durch die Ladungen, wurden die
Platten beschädigt. Wegen dem Gewicht musste man dazu auch Hebegeräte
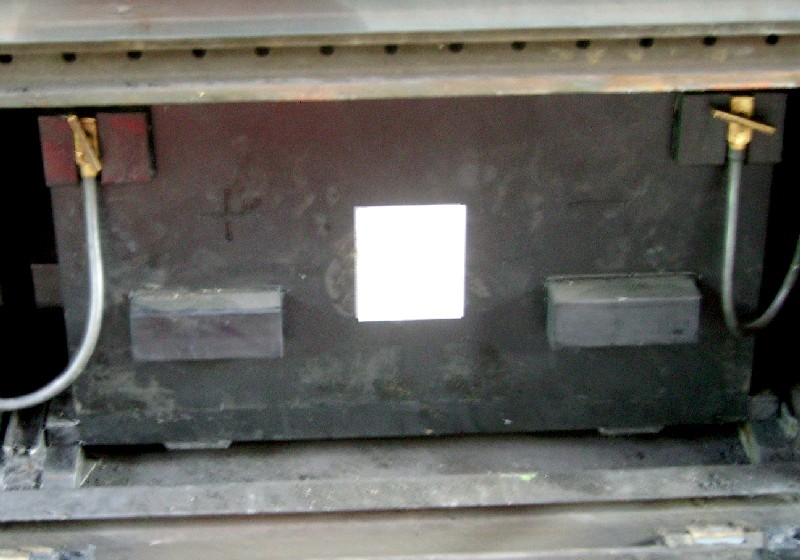
einsetzen können. In einer als Zelle bezeichneten Einheit konnte eine Spannung von zwei Volt erreicht werden. Durch die Schaltung der einzelnen Zellen konnte jede Spannung in den entsprechenden Schritten erzeugt werden.
Hier wurden Behälter mit neun Zellen verwendet. Damit konnte an
diesen eine
Spannung
von 18
Volt
abgegriffen werden. Mit sechs solchen Behältern wurde schliesslich
die nominal genannten 110 Volt für die Steuerung erreicht.
Verwendet wurden Behälter, wie sie bei den Eisenbahnen in Europa
durchaus üblich sind. Diese hatten eine sehr hohe
Kapazität.
Dabei konnten mit diesen
Batterien
dauerhafte
Ströme
über eine längere Zeit abgegeben werden. Gerade bei einer
Lokomotive
war das sehr wichtig, weil nur mit dieser
Spannung
gearbeitet werden konnte. Jedoch bei aller Optimierung, konnte das
Fahrzeug mit den
Bleibatterien
nur rund 30 Minuten bedient werden.
Stand von diesem Spannung zur Verfügung, wurden die Bleibatterien entlastet. Jetzt wurde die normale Spannung von 110 Volt auch rechnerisch erreicht.
Da diese von teilweise entladenen
Batterien
nicht mehr erreicht werden konnte, erfolgte nun ein Stromfluss zu den
Behältern. Dieser Stromfluss zu den Bleibatterien sorgte dafür, dass diese wieder geladen wurden. Das erfolgte so lange, wie die Spannung vom Batterieladegerät vor-handen war und die Batterien eine tiefere Spannung hatten.
War diese ausgeglichen, bezogen die
Batterien
keinen
Strom
mehr. Da nun aber in dieser Zeit keine Energie von den Behältern bezogen
werden konnte, übernahm das
Ladegerät
die Versorgung der Steuerung und der
Beleuchtung.
Kommen wir zur
Beleuchtung.
Auf einer
Lokomo-tive ging ohne Licht nicht sehr viel. Das mit der
Bedienung betraute Personal musste an
Instrumen-ten
Werte ablesen können und es benötigte Licht, wenn Schreibarbeiten erledigt
werden mussten. Als wenn das noch nicht genug wäre, die betriebsbereite
Lokomotive musste auch für das Personal im
Gleisfeld
ersichtlich sein. Grund genug, sich dem Licht etwas genauer anzunehmen.
So konnte mit Licht gearbeitet werden und gerade der
Maschinenraum
konnte nur so betreten werden, denn es waren ja keine seitlichen Fenster
mehr vorhanden. Genau diese Lampen müssen wir uns ansehen, denn es gab
zwei Schaltungen. War die Steuerung in den Grundzügen aktiviert worden, bewirkte das Löschen des Lichtes im Maschinenraum keine komplette Dunkelheit. Eine Lampe leuchtete immer und der Grund war der Fluchtweg.
Musste der Lokführer seinen Arbeitsplatz fluchtartig verlassen,
hatte er keine Zeit mehr, das Licht im
Maschinenraum
zu schalten. Die Notleuchte sorgte für dämmeriges Licht, so dass der Weg
erkannt werden konnte. Für die Instrumente wurde eine im Gerät eingebaute Beleuchtung verwendet. Diese war so ausgelegt worden, dass die Anzeigen in Dunkelheit erkannt wer-den konnten.
Sie blendete jedoch nicht, so dass eine Einstellung der Helligkeit
nicht mehr erforderlich war. Die hier vorhandenen Lampen leuchteten jedoch
nur, wenn auch die
Dienstbeleuchtung
eingeschaltet worden war. Dazu musste aber bereits das
Bordnetz
aktiviert werden. Bevor wir die Steuerung ansehen, schliessen wir die Beleuchtung ab. An der Front waren für die Erhellung des Bereiches vor der Lokomotive und für die Signalbilder Lampen vorhanden.
Unten an der
Front
wurden über den
Puffern
je zwei Lampen eingebaut. Bei der äusseren Lampe wurde das Licht mit
LED-Lampen
erzeugt und sie diente den
Signalbildern.
Die Leuchtmittel konnten so angesteuert werden, dass weisses, oder rotes
Licht erzeugt wurde.
Mit der zweiten nach innen gerichteten und nicht immer aktiven
Lampe konnte die Ausleuchtung verbessert werden. Eingeschaltet wurden sie
nur, wenn der Bediener das
Volllicht
verlangte. Jetzt löschte die äussere Lampe, denn sie wurde nur benötigt,
wenn mit der zweiten Lampe das
Fernlicht
erzeugt wurde. Die nun vorhandenen Ausbeute war so hoch, dass vor der
Lokomotive durchaus auch kleinere Hindernisse erkannt
werden konnten.
Um die einzelnen
Signalbilder
darstellen zu können, war im
Führerstand
ein dazu vorgesehener Drehschalter vorhanden. Mit diesem konnten die
gewünschten Bilder eingestellt werden. Dabei ist jedoch spannend, dass
diese unabhängig vom Land gezeigt werden konnten. Das
Lokomotivpersonal
musste daher wissen, welche Bilder angewendet werden dürfen. Eine
Kontrolle ob das richtige Signalbild gewählt wurde, gab es nicht.
Für die weiteren Schritte müssen wir das
Bordnetz
aktivieren. Das erfolgte durch die
Lokomotive. Mit dem geöffneten Batteriehahn wurde der
Bordrechner gestartet und die
Druckluft
aktiviert. Auf dem Bordrechner wurde das Betriebssystem SIBAS 32
gestaltet. Erst wenn dieses hochgefahren war, stand die
Leittechnik
bereit und die Lokomotive konnte durch das Personal in Betrieb genommen
werden. Welche der beiden Kabinen dazu benutzt wurde, war egal.
Bei der von der
Leittechnik
übernommenen Aufgaben änderte sich nicht so viel. Die vom
Lokomotivpersonal
mit Schaltelementen verlangten Aufträge wurden ausgeführt und dabei
der Schaltzustand überwacht. Gerade die Schritte bei der Einschaltung der
Lokomotive wurden sogar von der Steuerung geleitet. Dem
Lokführer wurden daher die erforderlichen Schritte vorgegeben und dazu
waren LCD-Bildschirme
verbaut worden.
Das zentrale Steuergerät übernahm die Koordination und es war der Teil, der mit dem Bedienpersonal kommunizierte.
Dabei konnten die durch das System erzeugten Text-meldungen in der
Sprache eingestellt werden. Bei der Reihe Re 474 waren das die
Landessprachen der Schweiz. Weitere Rechner waren die Steuergeräte für die An-triebe. Diese wurden auf die beiden Drehgestelle aufgeteilt.
Hier wurden die Signale vom zentralen Steuergerät so umgewandelt,
dass die gewünschten Schaltungen erfolgten. Dabei führte das
Antriebssteuergerät nicht nur die Aufgaben aus, sondern es überwachte die
Zustände. Damit konnten allfällige Probleme erkannt werden, die zu einer
Störung führten.
Die Störung eines Antriebssteuergerätes ASG wurde über den
Fahrzeugdatenbus
dem zentralen Steuergerät übermittelt. Die in diesem programmierten
Funktionen führten dazu, dass eine Handlung vorgenommen wurde.
Gleichzeitig wurde dem
Lokomotivpersonal
eine Störmeldung ausgegeben. Diese Ausgabe bestand aus einem kurzen
Infotext, der gelb hinterlegt wurde. Das Personal konnte dabei je nach
Situation ein Menu aufrufen.
In dem Menu waren auf die Situation zugeschnittene Anleitungen
vorhanden. Dabei waren in der Auswahl für die Fahrt nur einfache
Meldungen
zur weiteren Fahrt zu erkennen. Im Stillstand konnten dann die
Abhilfemassnahmen eingeleitet werden. Dabei waren aber immer Handlungen
des Personals erforderlich. Störungen wurden nicht immer automatisch
behoben. Auch bei diesen erfolgte die Ausgabe, so dass das
Lokomotivpersonal
den Zustand erkannte.
Diese
Meldungen
besassen jedoch andere Informationen, denn die Werkstatt musste wissen,
welcher
IGBT-Transistor
genau einen Defekt hatte. Beim
Lokomotivpersonal
reichte es, dass das ASG ausgefallen war und nicht mehr aktiviert werden
konnte. Neben diesen direkten Aufgaben wurden auch sekundäre Überwachungen von der Leittechnik übernommen. Dabei handelte es sich um die Kontrollen des Lokführers und um die Fernsteuerung von weiteren Lokomotiven.
Dabei beginne ich mit der Kontrolle des
Lokomotivpersonals
auf dessen Verfügbarkeit. Da gesundheitliche Probleme nicht ausgeschlossen
werden konnten, war die übliche
Sicherheitsfahrschaltung
Sifa
verbaut worden. Unabhängig vom befahrenen Land, wurde eine schnell wirkende Schaltung und eine Wachsamkeitskontrolle verwirklicht. Bei beiden wurden in gewissen zeitlichen Abständen Handlungen verlangt.
Erfolgten diese nicht, oder in einer unzulässigen Art, wurde von
der
Leit-technik
eine
Fahrsperre
erzeugt und eine
Zwangsbremsung
eingeleitet. Diese Reaktion konnte jedoch jederzeit mit den verlangten
Handlungen rückgängig gemacht werden.
Wie die Bedienung der
Sifa
erfolgte, erfahren wir im nächsten Kapitel. Mit dem Schritt zu den
Zugsicherungen
kommen wir in jenen Bereich, der in jedem Land anders war. Aktiviert
wurden die benötigten Anlagen durch die
Leittechnik.
Mit dieser konnte das befahrene Land eingestellt werden. So wurden neben
den Zugsicherungen auch alle anderen erforderlichen Schaltungen
vorgenommen. Wer Italien wählte, wollte mit
Gleichstrom
fahren.
Hier war ein Einsatz in der Schweiz und im benachbarten Italien
möglich. Während für die Schweiz die normalen Anzeigen und Bedienelemente
genutzt werden konnten, war für die italienischen Lösungen eigene Geräte
erforderlich. Bei Fahrten in der Schweiz waren die übliche Zugsicherung nach Integra-Signum mit der Haltauswertung verbaut worden. Diese Lösung kannte keine Bremskurven und daher wur-den eine zweite Lösung eingebaut.
Dabei kam jedoch nicht mehr die von der Schweiz verwendete Lösung
ZUB 121, sondern die mit zwei Kanälen arbeitende Variante
ZUB 262
ct zum Einbau. Diese war jedoch zu den Bauteilen der
Strecke kompatibel und daher funktionierte auch ZUB.
Speziell war, dass die
Lokomotiven für die Ausrüstung mit
ETCS
Level 2
vorbereitet wurden. Jedoch verzichtete man auf den Einbau, weil dieses
System damals erst auf der
Neubaustrecke zwischen Rothrist und Mattstetten verwendet
wurde. Dort sollten die Maschinen jedoch nicht eingesetzt werden. Was
diese Vorbereitung bedeutete, werden wir erfahren, wenn es um die
Änderungen und Umbauten der Maschine geht.
Wenn wir nun zum Einsatz in Italien kommen, dann wurden dort die
Systeme RCS und SCMT benötigt. Diese Systeme hatten ähnliche Funktionen,
wie die Lösungen
Integra-Signum
und
ZUB 262
ct. Wobei bei der Sistema die Controllo della Marcia del
Treno SCMT bereits eine einfache Signalisation in den
Führerstand
erfolgte. Die Signale entlang der Strecke wurden aber immer noch benötigt
und damit haben wir die
Zugsicherungen.
Für diese war ein
Zugdatenbus
vorhanden. Dieser war nicht immer aktiv. Aktiviert wurde der Datenbus mit
der
Vielfachsteuerung.
Hier waren dazu drei verschie-dene Lösungen vorhanden, die codierte
Signale über die
UIC-Leitung
übermittelten. Bei der zeitmultiplexen Mehrfachtraktionssteuerung ZMS war die Vielfachsteuerung von bis zu vier Lokomotiven möglich. Dabei wurde nur jene mit dem besetzten Führerstand als Master geführt.
Die ferngesteuerten Maschinen empfingen die Befehle und gaben
allfällige Störungen zurück. Die Regelung war so integriert, dass das
zentrale Steuergerät des Masters die erzeugbaren Zug- und
Bremskräfze
automatisch be-schränkte.
Mit der ZDS kommen wir zur zweiten
Vielfachsteuer-ung.
Dabei steht hier das D für
Doppeltraktion.
Diese Stellung ermöglichte es, auch die
Baureihe
120 zu verbinden. Sie kam jedoch nicht nur dann, sondern auch bei
Störungen der üblichen
ZMS
zur Anwendung. Nun konnten aber nur noch zwei
Lokomotiven miteinander verbunden werden. Die weiteren
Maschinen mussten abgerüstet werden. Es war also wirklich nur ein
Notprogramm vorhanden.
Schliessen wir die Fern- und
Vielfachsteuerung
mit der
Fernsteuerung
ab. Sollte die
Lokomotive ab einem
Steuerwagen
bedient werden, wurde die Anlage auf
ZWS
gestellt. Mit dieser Wendezugsteuerung blieb die Lokomotive der Master und
nur die Bedienelemente befanden sich auf einem anderen Fahrzeug. Eine
Kombination von ZWS und
ZMS
war jedoch nicht möglich, so dass ab Steuerwagen nur eine Lokomotive
vorhanden war.
Der Grund war, dass auf dem ferngesteuerten Fahr-zeug das Ohr des Lokführers nicht mehr vorhanden war. Zudem konnte nur so die Adhäsion optimal aus-genutzt werden. Der von der Schweiz her bekannte Schleuderschutz war in dieser Form nicht mehr vorhanden. Um durchdrehende Achsen abzufangen, war eine Kraftschlussregelung vorhanden. Diese reduzierte die Zugkraft und regelte sich anhand der verfüg-baren Adhäsion neu ein.
Um die Werte zu verbessern, konnte manuell durch das
Lokomotivpersonal
die
Sandstreueinrichtungen
aktiviert werden. Eine Regelung, welche die
Trieb-achsen
mit wenig
Luftdruck
bremste, war jedoch nicht vorhanden. Auch die maximale Drehzahl wur-de
nicht einbezogen.
Weitaus grössere Gefahr stellten blockierte
Räder
dar. Um verschliffene
Achsen
zu vermeiden, war ein normaler
Gleitschutz
verbaut worden. Dieser arbeitete nach dem gleichen Prinzip wie die
Kraftschlussregelung
und er sollte blockierte Räder verhindern. Aktiv war er, bei Anwendung der
elektrischen
Bremse, aber auch bei den
Druckluftbremsen.
Dabei wurde die maximal mögliche
Bremskraft
mit der Regelung eingestellt.
Vom
Gleitschutz
nicht erkannt wurde die Situation mit komplett blockierten
Achsen.
In dem Fall wurde von der Steuerung angenommen, dass die
Lokomotive angehalten hat. Eine Gefahr, die mit
elektronischen Mitteln nicht eingedämmt werden konnte. In diesem Fall war
wirklich das Gefühl des Bedieners gefragt und wir können nun auch zur
Bedienung der Lokomotive wechseln, denn auch dort finden sich Punkte der
Steuerung.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2025 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||

 Um
einen längeren Betrieb zu ermöglichen, musste eine andere Quelle her. Das
waren die
Um
einen längeren Betrieb zu ermöglichen, musste eine andere Quelle her. Das
waren die

 Fehlt
nur noch die obere in der Mitte unterhalb der
Fehlt
nur noch die obere in der Mitte unterhalb der
 Wie
bei modernen
Wie
bei modernen
 Gerade
bei Störungen war es auch wichtig, dass diese vom Personal des Unterhaltes
erkannt werden konnten. Über eine Schnittstelle konnten die Störungen auf
einen tragbaren Computer übertragen werden.
Gerade
bei Störungen war es auch wichtig, dass diese vom Personal des Unterhaltes
erkannt werden konnten. Über eine Schnittstelle konnten die Störungen auf
einen tragbaren Computer übertragen werden. Je
nach den auf der
Je
nach den auf der
 Weitere
Bereiche der Steuerung werden wir bei der Bedienung noch ansehen. Wir hier
haben jedoch noch eine Funktion, die nur indirekt damit zu tun hat. Es ist
die Fern- und
Weitere
Bereiche der Steuerung werden wir bei der Bedienung noch ansehen. Wir hier
haben jedoch noch eine Funktion, die nur indirekt damit zu tun hat. Es ist
die Fern- und
 Wegen
der
Wegen
der